













生まれたばかりの動物は捕食者からの襲撃を避けるため、できるだけ早期に歩行機能を獲得する必要がある。四肢の筋肉と腱の正確な協調を獲得するには相応の時間を要するが、初期の転倒に伴う損傷を防ぐことに関しては脊髄における運動制御反射が大きな役割を果たす。ドイツ・マックスプランク研究所のチームは、このような脊椎動物の歩行機能獲得過程を調べ、機械学習アルゴリズムで歩行学習を最適化する四足歩行ロボットを開発した。
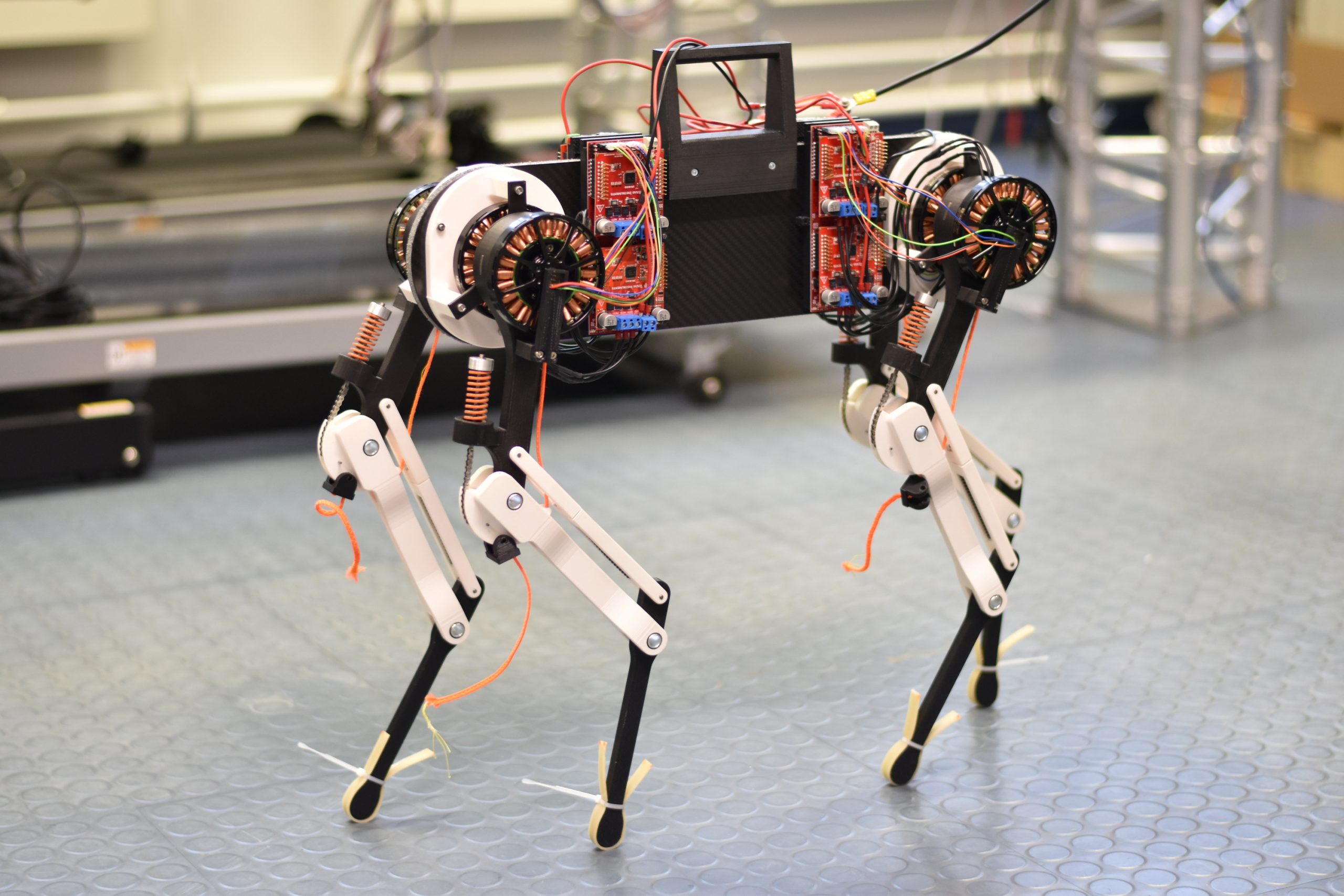
同研究所がこのほど明らかにしたところによると、チームが開発したロボット「Morti」はベイズ最適化アルゴリズムで歩行学習を誘導するというもの。足裏にセンサーを備え、仮想脊髄のモデル化された目標データと継続的に実測値を照合することで、反射ループを介した運動制御パターンを構築し、歩行を獲得する。Nature Machine Intelligenceからこのほど公表された論文によると、Mortiは1時間以内に歩行を学習することができるとともに、複雑なコントロールシステムを備えた産業用四足ロボットと比較し、エネルギー効率を42%向上させることができるとする。Mortiでは、ロボットの質量や形状を正確に把握した上でのコントロールシステムの統合が不要となり、このことが消費電力の効率化に直結している。
研究を主導したFelix Ruppert氏は「我々のロボットは事実上、脚の解剖学的構造もその仕組みも知らずに誕生する」とした上で、「センサーデータが想定と異なる場合、学習アルゴリズムは、ロボットがつまずかずにうまく歩けるようになるまで歩行動作を変化させる。反射を活発にし、ロボットのつまずきをモニターしつつ、微細な出力変化を続けることが学習プロセスの核となる」と説明している。動物の神経系における反射経路を考慮した学習は珍しく、研究知見の広範な応用可能性に注目が集まっている。
関連記事:






